A quick search turned up this "library" (actually it is in Python, where such things properly are called "Modules") for driving the Si5351 from a Pi. I decided to give it a spin - so I (literally) dusted off my Pi.
First, I had to learn how to use I2C - which I'd never done before on this platform. Actually - that's a lie: first I had to remember how to log in to the Pi, but we won't embarrass ourselves by revealing that truth!
Firing up I2C in Raspberry-land involves a few easy steps, which are reasonably well covered in (e.g.) this instructable. If, like me, you have a 512MB Pi, note that the I2C channel is number 1 (not 0, as given in the instructable referenced here - and many other "how to" resources on the net).
Once you get all the soft resources in place on your Pi, you're in a position to make the hardware connections to the GPIO pins (SDA is pin 3 and SCL is pin 5 on my RPi model B). I used my fancy GPIO breakout, of course.
My first experiment used the Si5351 on the Adafruit breakout board - which you can see in the photo below...

With this hardware in place, I was able to test the I2C connection with the "I2CDETECT" command, which showed the Si5351 reporting for duty in her correct place (at 0x60)...

In the screen grab above, you can also see my call to the little program I wrote to set up the Si5351, using the resources in the "library" - man, was that a pain! This "library" is is re-work of the Adafruit (Arduino) library for the Si5351 (the quality of which I've commented upon before) and this resource is even weaker. There is pretty much zero documentation - so the little program below is just my very poor attempt to get something to run - which it manages to do...

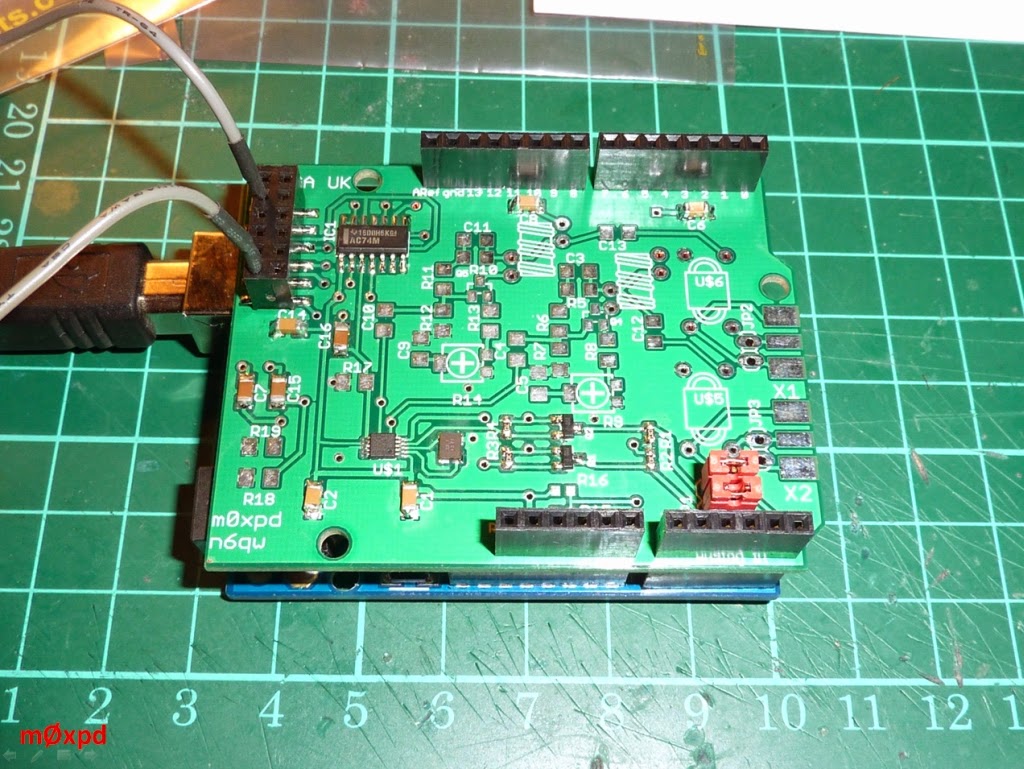
Having satisfied myself that I could drive an Si5351 from the RPi, I hooked up the new prototype board. I emphasize there was NO ADDITIONAL INTERFACE HARDWARE USED - the new board can interface directly to the Pi or any other system - even with 3v3 logic (such as the Arduino DUE).
Here's the system on the bench - the Arduino UNO at top left of the photo was used to source the 3V3 and 12V to power the new board (the RPi's 3v3 output is only rated to supply up to 50 milliAmps and - of course - there's no 12V supply).

The screen grabs from the RPi desktop were made using the (comically named) "SCROT" and emailed to the computer on which I'm writing this drivel. Whilst this method works, it does seem awfully inefficient (having the image take a long detour through the internet when the two computers are only inches from one another). So - I took the opportunity to learn about installing a Windows-compatible network "share" on my Raspberry Pi. This is made possible through a program called Samba, which works very well.
The morals of this story are:
1) The new (prototype) Kanga / m0xpd / n6qw board works FB with the Raspberry Pi
2) Thank God for Jason, nt7s' EXCELLENT Si5351 (Arduino) library
3) There is (as far as I know) a gap in the market for an equivalent library / module for the RPi
4) Maybe - just maybe - I'll order that Model B Plus and/or a Model A Plus
...-.- de m0xpd